Автоматы
Автомат (state machine) в языке UML представляет собой некоторый формализм для моделирования поведения элементов модели и системы в целом. В метамодели UML автомат является пакетом, в котором определено множество понятий, необходимых для представления поведения моделируемой сущности в виде дискретного пространства с конечным числом состояний и переходов. С другой стороны, автомат описывает поведение отдельного объекта в форме последовательности состояний, которые охватывают все этапы его жизненного цикла, начиная от создания объекта и заканчивая его уничтожением. Каждая диаграмма состояний представляет некоторый автомат.
Простейшим примером визуального представления состояний и переходов на основе формализма автоматов может служить рассмотренная выше ситуация с исправностью технического устройства, такого как компьютер. В этом случае вводятся в рассмотрение два самых общих состояния: "исправен" и "неисправен" и два перехода: "выход из строя" и "ремонт". Графически эта информация может быть представлена в виде изображенной ниже диаграммы состояний компьютера (рис. 6.1).
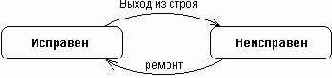
Рис. 6.1. Простейший пример диаграммы состояний для технического устройства типа компьютер
Основными понятиями, входящими в формализм автомата, являются состояние и переход. Главное различие между ними заключается в том, что длительность нахождения системы в отдельном состоянии существенно превышает время, которое затрачивается на переход из одного состояния в другое. Предполагается, что в пределе время перехода из одного состояния в другое равно нулю (если дополнительно ничего не сказано). Другими словами, переход объекта из состояния в состояние происходит мгновенно.
В общем случае автомат представляет динамические аспекты моделируемой системы в виде ориентированного графа, вершины которого соответствуют состояниям, а дуги — переходам. При этом поведение моделируется как последовательное перемещение по графу состояний от вершины к вершине по связывающим их дугам с учетом их ориентации.
Для графа состояний системы можно ввести в рассмотрение специальные свойства.
Одним из таких свойств является выделение из всей совокупности состояний двух специальных: начального и конечного. Хотя ни в графе состояний, ни на диаграмме состояний время нахождения системы в том или ином состоянии явно не учитывается, предполагается, что последовательность изменения состояний упорядочена во времени. Другими словами, каждое последующее состояние всегда наступает позже предшествующего ему состояния.
Еще одним свойством графа состояний может служить достижимость состояний. Речь идет о том, что навигация или ориентированный путь в графе состояний определяет специальное бинарное отношение на множестве всех состояний системы. Это отношение характеризует потенциальную возможность перехода системы из рассматриваемого состояния в некоторое другое состояние. Очевидно, для достижимости состояний необходимо наличие связывающего их ориентированного пути в графе состояний.
Формализм автоматов допускает вложение одних автоматов в другие для уточнения внутренней структуры отдельных более общих состояний (макросостояний). В этом случае вложенные автоматы получили название подавтоматов. Подавтоматы могут использоваться для внутренней спецификации процедур и функций, образующих поведение исходного объекта. Например, состояние неисправности технического устройства (рис. 6.1) может быть детализировано на отдельные подсостояния, каждое из которых может характеризовать неисправность отдельных подсистем, входящих в состав данного устройства.
В языке UML понятие автомата дополнено специальной семантикой входящих в соответствующий пакет элементов. Далее в этой главе будут рассмотрены основные элементы поведения, которые образуют концептуальный базис, необходимый для правильного построения диаграмм состояний.
Формализм обычного автомата основан на выполнении следующих обязательных условий:
Другими словами, автомат "забывает" все состояния, которые предшествовали текущему в данный момент времени. Образно говоря, существует непрозрачная стена, отделяющая текущее состояние от прошлого поведения объекта.
Примечание
Данное условие может быть изменено явным образом для сохранения некоторых аспектов предыстории поведения объекта на основе введения в рассмотрение так называемых исторических состояний, которые будут описаны ниже в этой главе.
Примечание
Это условие ограничивает применение автоматов для моделирования последовательных процессов. Необходимость моделирования параллельных процессов приводит к рассмотрению в контексте одной модели нескольких автоматов, каждый из которых специфицирует отдельный процесс поведения.
Примечание
Концепция времени в явной форме учитывается при построении диаграммы деятельности, когда требуется синхронизировать во времени процессы взаимодействия нескольких объектов модели. Поскольку диаграмма состояний предназначена для моделирования поведения объекта, которое определяется асинхронными событиями, эти события могут происходить в заранее неизвестные моменты времени.
При этом отдельные псевдосостояния могут не иметь спецификаций (начальное и конечное состояния). В этом случае их назначение и семантика полностью определяются из контекста модели и рассматриваемой диаграммы состояний.
Таким образом, правила поведения объекта, моделируемого некоторым автоматом, определяются, с одной стороны, общим формализмом автомата, а с другой — его графическим изображением в языке UML в форме конкретной диаграммы состояний.